Fast Fourier Transforms (or FFT’s) are the first-stop for the numerical computation of Fourier transforms, but I recently learned that they are not well suited to evaluating the Fourier integral

This is stated explicitly in Numerical Recipes, and to borrow the words of a 1920’s author
[…] the actual computation of integrals such as [the Fourier integral] by quadratures when
is large though not infinite is, in practice, a matter of very considerable difficulty, for, on account of the rapid oscillation of the function
the ordinary quadrature formulae such as Simpson’s require for their application the division of the range of integration into such minute steps that the labour of calculation is prohibitive.”
Whilst the nature of our labour has changed, the difficulty remains, because the Fourier integral extends to 
The first integral to be solved is

We will assume a rule of the form

where 


![[a, b]](https://s0.wp.com/latex.php?latex=%5Ba%2C+b%5D&bg=ffffff&fg=404040&s=0&c=20201002)


whilst substituting on the RHS gives
This set of equations could certainly be solved if

so cancel the 
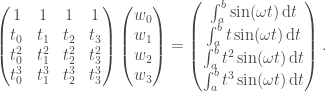
The integrals on the RHS can be evaluated using integration by parts, or more concisely with the incomplete gamma function [2; sec. 2.631]*. With those integrals solved, the weights can be found for any chosen set of
Example of Simple Quadrature Formula
The function to be integrated is

where 

import numpy as np
import matplotlib.pyplot as plt
import mpmath as mp
def analytical(w, a, b, c=1):
lower = 1/2 * ( 1j * mp.sinh(c*w) * ( mp.ci(w*(a-1j*c)) - mp.ci(w*(a+1j*c)) ) + mp.cosh(c*w) * (mp.si(w*(1j*c+a)) - mp.si(w*(1j*c-a))))
upper = 1/2 * ( 1j * mp.sinh(c*w) * ( mp.ci(w*(b-1j*c)) - mp.ci(w*(b+1j*c)) ) + mp.cosh(c*w) * (mp.si(w*(1j*c+b)) - mp.si(w*(1j*c-b))))
return upper - lower
To find the weights for my numerical approach, I first have to select some sample positions for
t_i = np.linspace(a, b, N)
Next I have to use these sample locations to generate the matrix on the LHS of the equation, which I do with
matrix = np.ones((len(t_i), len(t_i)))
for i in range(1, len(t_i)):
matrix[i] = t_i**i
To generate the row matrix on the RHS, I first have to define functions to evaluate the integrals which I do with
def intxnsin(w, a, b, n):
'''
Returns the integral
\int_{t = a}^{b} t^n sin(w t) dt
Method is not the most general, but doesn't rely on special functions
and can be far quicker as a result.
'''
lower = -1j/2 * ( 1/(1j*w)**((n+1)) * mp.gammainc(n+1, 1j*w*a) - 1/(-1j*w)**((n+1)) * mp.gammainc(n+1, -1j*w*a) )
upper = -1j/2 * ( 1/(1j*w)**((n+1)) * mp.gammainc(n+1, 1j*w*b) - 1/(-1j*w)**((n+1)) * mp.gammainc(n+1, -1j*w*b) )
return upper - lower
and then I generate the row array with
rhs = np.array([intxnsin(t_i[0], t_i[-1], i, w) for i in range(len(t_i))], dtype=np.complex128)
where the mp.mpc objects are automatically cast to np.complex128 types by the dtype argument. Now find the weights by solving the linear system
weights = np.linalg.solve(matrix, rhs)
and evaluate the integral with
integral = np.sum(weights * f(t_i))
To speed up this process, all of these steps can be put into a single function
def intfsin(f, w, a, b, N):
'''
Returns the integral
\int_{t = a}^{b} f(t) sin(w t) dt
Method is not the most general, but doesn't rely on special functions
and can be far quicker as a result.
'''
# Choose some equally spaced sample points
t_i = np.linspace(a, b, N)
# Generate the matrix from these sample points
matrix = np.ones((len(t_i), len(t_i)))
for i in range(1, len(t_i)):
matrix[i] = t_i**i
# evaluate the moments
rhs = np.array([intxnsin(w, t_i[0], t_i[-1], i) for i in range(len(t_i))], dtype=np.complex128)
# Solve the linear problem to get the weights
weights = np.linalg.solve(matrix, rhs)
# Evaluate the integral and return
integral = np.sum(weights * f(t_i))
return integral
To evaluate the integral we first define a function for
def f(t, c=1):
return t/(t**2+c**2)
and then integrate it between 

intfsin(f, 9, 0.1, 0.2, 3)
Figure 1 shows the absolute error as a percentage of the analytical solution for various numbers of sample points. With 3 points the error is close to 0.0005%, whilst with 5 it’s even smaller.
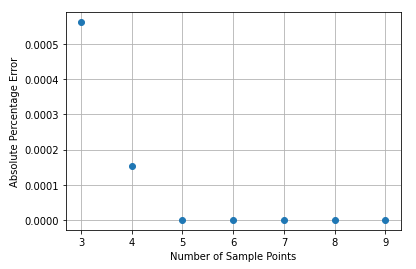
Figure 1 – Absolute difference from the analytical solution as a percentage.
This may seem pretty good, but look at Figure 2 to see what happens when we increase the upper limit from 0.2 to 10. Not only is the accuracy far worse for a given number of points, using more than 11 points actually increases the error! Clearly, we’ve had some success but the problem is not solved!
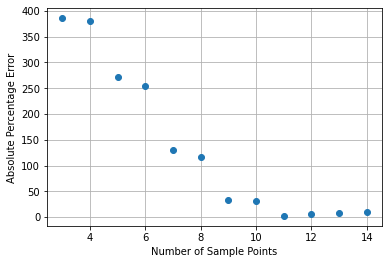
Figure 2 – Absolute difference from the analytical solution as a percentage.
Discussion
By integrating a function between nearby limits we’ve demonstrated some limited success, but the solution gets worse as the limits are separated. The reason for this is that we’re attempting to fit a polynomial to what might be a complicated function. The larger the range, the worse the fit is likely to be; which naturally leads to the idea of dividing the integral into a finite number of ranges, and fitting the polynomial inside each range. Since we’re not sampling the integrand at a finite number of positions but
Dividing the Range
The integral range will be divided up into 

where 



[1 2 3 4 5] [5 6 7 8 9] [ 9 10 11 12 13], which just shows that the last sample point of one region is the first sample point of the next.
N = 3 # Number of regions
n = 5 # samples per region
xs = np.arange(1, ((n-1)*N+1) + 1) # make demo sample points, +1 to include endpoint
nn = 0
for i in range(N): # loop over N regions
sample_x = xs[nn:nn+n] # Take the points for this region
nn += n - 1 # Adjust the index for the next iteration
print(sample_x) # Print the points in this region
del(N, n, xs, nn, sample_x) # Clean up
Example with Splitting up the Range
I’ll use the new method to evaluate the integral from the previous example. My function intfsin() took an input function and two limits, but now it would be easier if the intfsin() could just take the sample times and the sampled function then the limits are just the first and last sample times. This new function, newintfsin(), is shown below.
def newintfsin(ts, fts, w):
'''
ts = sample times
fts = f(ts), function evaluated at the sample times
w = angular frequency to evaluate at
'''
# Generate the matrix
matrix = np.ones((len(ts), len(ts)))
for i in range(1, len(ts)):
matrix[i] = ts**i
# Evaluate the moments for this region
rhs = np.array([intxnsin(w, ts[0], ts[-1], i) for i in range(len(ts))], dtype=np.complex128)
# Calculate the weights
weights = np.linalg.solve(matrix, rhs)
# Evaluate the integral and return the result
integral = np.sum(weights * fts)
return integral
Now we just need a new function to split up the range between 

newintfsin() for each region and then sum the results. The code below achieves this by logarithmically spacing the sample locations.
def splitint(f, w, a, b, N, n=3):
'''
Returns the integral
\int_{t = a}^{b} f(t) sin(w t) dt,
by splitting up the region between a and b into N regions.
There are n samples within each region and a total of
N(n-1) + 1 logarithmically spaced samples.
'''
# Generate N(n-1) + 1 sample locations
ts = np.logspace(np.log10(a), np.log10(b), (n-1)*N + 1)
# Evaluate the function at these sample points
fts = f(ts)
# Loop over the regions. For each region take n samples
# and use them to run newintfsin() to compute the integral
# in this region. Add the result for each region to result.
result = 0
nn = 0
for i in range(N):
sample_t = ts[nn:nn+n]
sample_ft = fts[nn:nn+n]
result += newintfsin(sample_t, sample_ft, w)
nn += (n-1)
return result
To call this function between the limits 

splitint(f, 9, 0.1, 10, 20, n=5), which returns 2.26728e-03; very close to the analytical result of 2.26724e-03. Figure 3 shows the percentage error from the analytical solution for different values of the upper limit, with 


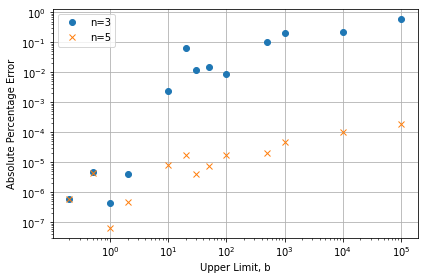
Figure 3 – Absolute difference from the analytical solution as a percentage for different values of
, with the integration range split into 100 regions and with and .Discussion
It would seem that the problem has been solved by splitting the region between
[1] – L. N. G. Filon, “On a Quadrature Formula for Trigonometric Integrals”,
Proceedings of the Royal Society of Edinburgh, 1930, https://doi.org/10.1017/S0370164600026262.
[2] – Gradstein [2.632]
* In the 7th edition equations 2.631.1 and 2.631.3 are both missing minus signs.
[3] – https://www.wolframalpha.com/input?i=integrate+x+sin%28w*x%29%2F%28x%5E2+%2B+c%5E2%29+dx
