
In this post I’ll demonstrate how to find the magnetic field of steady currents with FEniCS. I’ll start this with a simple example of a coaxial conductor with a uniform current, before moving onto the more interesting example of a cos(φ) magnet of the sort used in particle accelerators like the LHC. I’ll include linear magnetic materials for the yoke and will be using boundary conditions to exploit symmetry.
Contents
1.0 – Introduction and Background
2.0 – Magnetostatic Coax Example
2.1 – Analytical Solution
2.2 – Geometry in Gmsh
2.3 – FEniCS Solution
2.4 – Comparison and Discussion
3.0 – cos(φ) Magnet Example
3.1 – Analytical Background
3.2 – Geometry
3.2.1 – Mesh
3.3 – FEniCS Solution
3.3.1 – Import Mesh
3.3.2 – Boundary Conditions
3.3.3 – Define current density
3.3.4 – Define material properties
3.3.5 – Solve
3.4 – Exploration of Numerical Results
4.0 – Conclusion
Introduction
Despite the fact that in general, magnetism is an incredibly complicated process, humanity has been aware of its effects since at least 500 BC [1]. The Lodestones of antiquity were magnetised materials which we would refer to as “permanent magnets” today. This type of magnetism is a purely quantum mechanical effect and will not be the focus of this post. We will be focusing on the far simpler classical magnetism; although I find it interesting that the quantum mechanical effects were discovered so much earlier than the classical.
Classical mechanics and Quantum mechanics agree that moving charges generate magnetic fields, which can go on to deflect the motion of other moving charges. This is described by two of Maxwell’s equations


The magnetic field can be written in terms of the vector potential

and assuming the fields are static, the second equation becomes

The term on the RHS can be expanded in the usual way

There is some Gauge freedom in the definition of 


which is commonly known as the Poisson equation. That’s right, my first FEniCS post which isn’t about electrostatics, but it’s still solving the Poisson equation!
2.0 – Magnetostatic Coax
The first example will be a problem with an analytical solution. The geometry consists of two concentric cylinders whose lengths extend to infinity in both directions. The inner cylinder defines a region of uniform current density, 


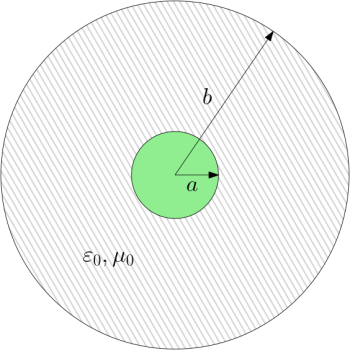
 indicated by the green circle of radius .
indicated by the green circle of radius .2.1 – Analytical Solution
The field for this problem can be solved with the integral form of Ampere’s law, but I’ll solve it with the Poisson equation
and since


In cylindrical coordinates this is

and from symmetry there will be no 

where the partial derivatives have become full derivatives because the other dependencies are zero. This is a non-homogeneous, second order differential equation and we have to solve it in the three regions: 




By investigation we can see that there will be a particular solution of the form 



and the full solution in region 

Region 1 contains the origin, where 


and in region 2, 



Since the field is going to depend on derivatives of 



and


Since there are no surface currents, the derivatives with respect to 

which gives the final solutions

Now we find the magnetic field from 



which is the usual result from Ampere’s law.
2.1 – Geometry in Gmsh
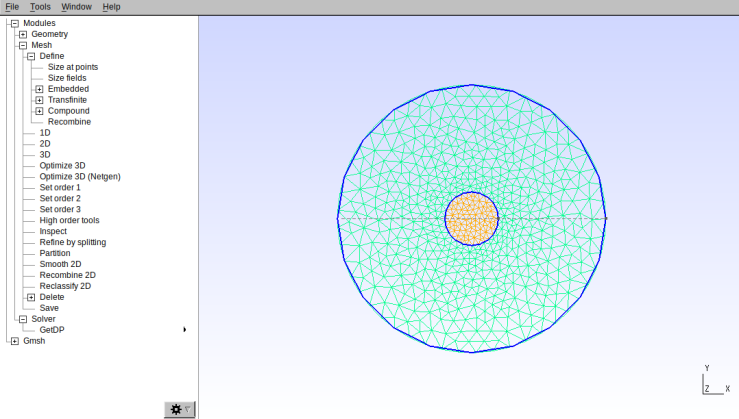
The geometry of this problem is described as two concentric discs, which has already been made in an earlier post. The mesh is shown in Figure 2, where the colours of the mesh indicate regions where 
gmsh -2 FILENAME.geo -format msh2
which will produce a file called FILENAME.msh file [3]. This needs to be converted to the FEniCS format with the command
dolfin-convert FILENAME.msh FILE_OUT.xml
which should produce three output files FILE_OUT.xml, FILE_OUT_physical_region.xml and FILE_OUT_facet_region.xml. If you haven’t got these files the rest of the tutorial won’t work.
2.3 – FEniCS Solution
The first step is to import FEniCS, numpy for numerical manipulation, matplotlib for planning and the value of mu_0 from scipy.constants.
import fenics as fn import matplotlib.pyplot as plt import numpy as np from scipy.constants import mu_0
Next we import the mesh, and plot it just to be sure it’s what we’re expecting
mesh = fn.Mesh('geometry/geo_charge.xml')
subdomains = fn.MeshFunction("size_t", mesh, 'geometry/geo_charge_physical_region.xml')
boundaries = fn.MeshFunction('size_t', mesh, 'geometry/geo_charge_facet_region.xml')
plt.figure()
fn.plot(mesh)
plt.show()
Next we produce some function spaces and measures. The measures, dx and ds, are small line and area measurements used for performing integrals. The function space V0 will be used to visualise functions like the charge density which are just constant in different regions, and V will be the function space for our solutions and will be 2D.
dx = fn.Measure('dx', domain=mesh, subdomain_data=subdomains)
ds = fn.Measure('ds', domain=mesh, subdomain_data=boundaries)
V0 = fn.FunctionSpace(mesh, 'DG', 0)
V = fn.FunctionSpace(mesh, 'P', 2)
Now all the preparation has been finished and we will start to specify the specifics for this problem. First we need to define boundary conditions, and in this case there is only the condition that the potential is constant at the outer boundary. This is necessary because there should be no azimuthal dependence to the solution. The number 4 here is the physical line added to the outer circle in Gmsh.
outer_boundary = fn.DirichletBC(V, fn.Constant(0), boundaries, 4) bcs = [outer_boundary]
Next we define a source term with a UserExpression, which lets constants be assigned with different values in different regions. Here we have a current density 
j = 5
class current_density(fn.UserExpression):
def __init__(self, markers, **kwargs):
self.markers = markers
super().__init__(**kwargs)
def eval_cell(self, values, x, cell):
if self.markers[cell.index] == 1:
values[0] = j
else:
values[0] = 0
return 0
j_1 = current_density(subdomains, degree=1)
The current density can be plotted to make sure all of the marker numbers have been set properly, the code to plot this is blow and the result is shown in Figure 3.
plt.figure(figsize=(6,6)) fn.plot(mesh, linewidth=0.5) p = fn.plot(fn.project(j_1, V0)) plt.colorbar(p) plt.tight_layout() plt.show()
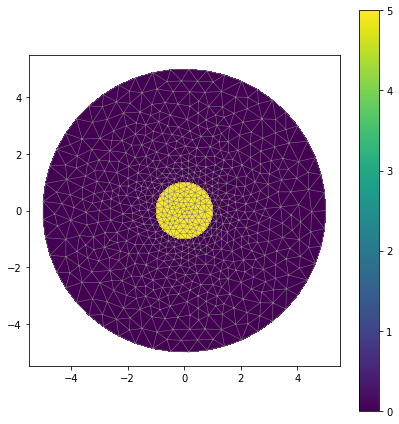
The current density looks correct so now we’ll move onto solving the problem. Since this is the Poisson equation again we can use the same code used in earlier posts, except now the source term is defined by 
# Define variational problem A_z = fn.TrialFunction(V) v = fn.TestFunction(V) a = fn.dot(fn.grad(A_z), fn.grad(v))*dx L = mu_0 * (j_1*v*dx(1) + j_1*v*dx(2)) # Solve variational problem A_z = fn.Function(V) fn.solve(a == L, A_z, bcs)
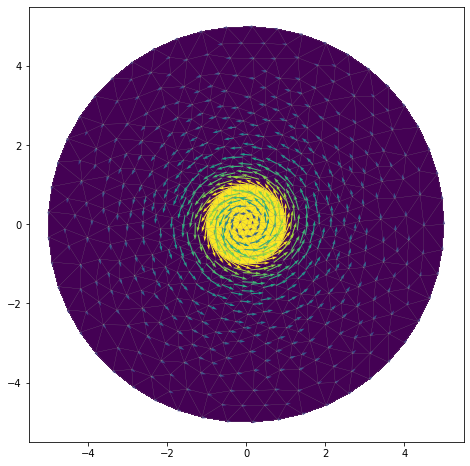
After running this A_z will be the vector potential and we can find the magnetic field by manually performing a curl operation and projecting the result onto a vector function space. The method .dx() performs a partial derivative in the specifies direction, so this is 
W = fn.VectorFunctionSpace(mesh, 'P', 1) B = fn.project(fn.as_vector((A_z.dx(1), -A_z.dx(0))), W)
2.4 – Comparison and Discussion
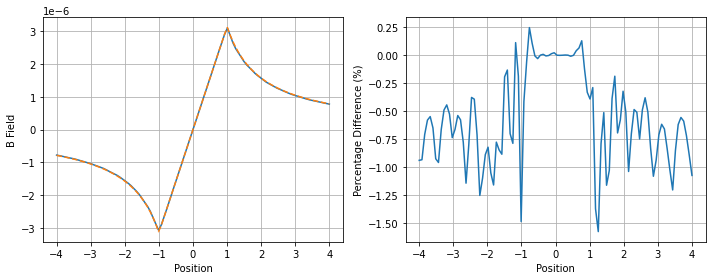
To compare the result from FEniCS with the analytical solution, I’ve evaluated the magnetic field along the line from (-4, 0) to (+4,0) and overlaid the analytical result. The results are shown in Figure 5, and show a very good agreement; numerical results differ from the analytical by less than 2%. We can also see by eye that this field is in the direction we’d expect for a positive current in a right-handed coordinate system (which was imposed by curl operator).
Although this example has been a useful example, the geometry is simple enough to be solved analytically. The code used to solve the problem with FEniCS applies equally well to problems with more complex geometries, as we shall see in the next example.
3.0 – cos(φ) Magnet Example
Particle accelerators like the Large Hadron Collider (LHC) rely on dipole magnets to bend beams of charged particles around onto a curved path. They come in a variety of shapes and sizes, but a popular choice these days is the 
In this example we’ll simulate something that resembles a magnet like this; although it won’t be identical.

3.1 – Analytical Background
Suppose a surface current in the 

 and the
and the  in two regions.
in two regions.If the current were uniform, then the magnetic field inside would be zero, but in this configuration the currents are reminscent of a solenoid and magnetic fields are expected in the internal region. In the previous section we derived the equation
which is still valid for our concentric cylindrical geometry. Just as before, there’s no variation with

This can be solved with separating the variables with 


The next step is to set both of these equal to a constant,

which is possible because these two functions share no coordinate dependencies. The solution to 

and since 




Now the solution to 

so that

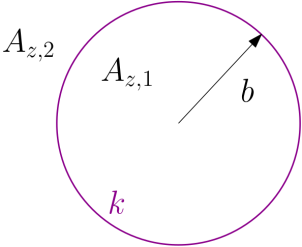
where 
The innermost region contains the origin, so unless 

The opposite is true in the outer region when 


Now we have to apply matching conditions at the interface between the two regions at 


Next we use 


after some manipulation we reach

which gives the inner vector potential as

which is the vector potential of interest. Now find the magnetic field in this region with
![\vec{B} = \left[ \frac{1}{r} \frac{\partial A_{z, 1}}{\partial \phi} \right] \hat{r} - \left[ \frac{\partial A_{z, 1}}{\partial r} \right] \hat{\phi},](https://s0.wp.com/latex.php?latex=%5Cvec%7BB%7D+%3D+%5Cleft%5B+%5Cfrac%7B1%7D%7Br%7D+%5Cfrac%7B%5Cpartial+A_%7Bz%2C+1%7D%7D%7B%5Cpartial+%5Cphi%7D+%5Cright%5D+%5Chat%7Br%7D+-+%5Cleft%5B+%5Cfrac%7B%5Cpartial+A_%7Bz%2C+1%7D%7D%7B%5Cpartial+r%7D+%5Cright%5D+%5Chat%7B%5Cphi%7D%2C&bg=ffffff&fg=404040&s=0&c=20201002)

Now we’re interested in the case where 


It is clear why such a current distribution would be of practical interest; the field is purely vertical which is exactly what we’d need to give particles a horizontal bend. While making a perfectly circular cross-section surface current of this kind isn’t practical, approximations of the angular distribution can be made by stacking wires into groups. Look again at Figure 6, and you will notice the wire density is higher close to 
3.2 – Geometry
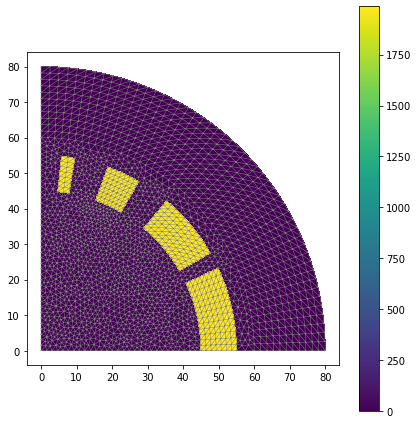
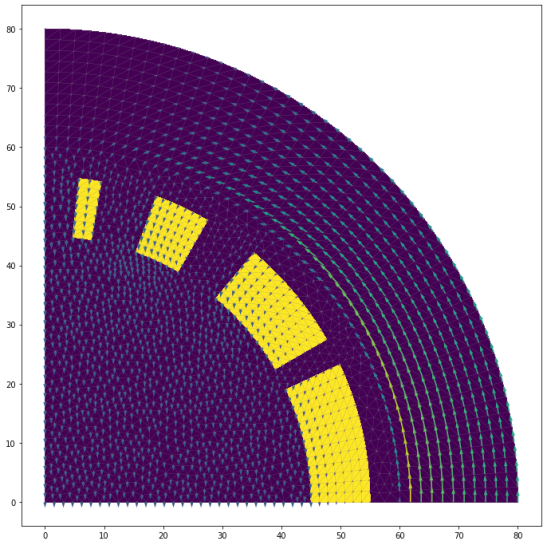
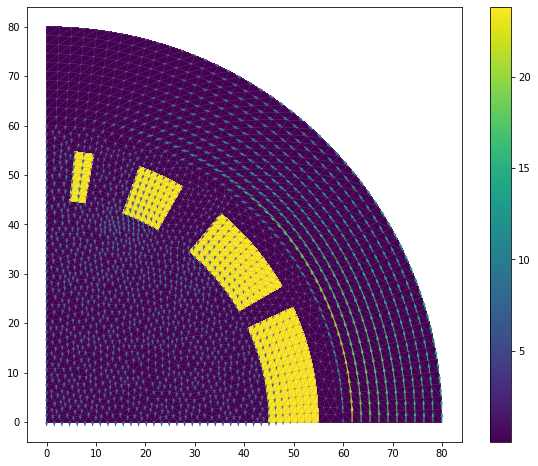
Superconducting magnets are regularly made with flat rutherford cables as shown in Figure 8. As you can see this cable is wide, thin and can be wrapped around to form blocks. The individual wires don’t need to be simulated and instead blocks of wires will be modelled as regions with a current density, as shown in Figure 9; yellow indicates a current density and purple indicates no current density; note that this is only a quarter of the full magnet geometry but I’ll be taking advantage of symmetry as described in an earlier post. There will be a cylinder of high permeability material outside the coils, but the region enclosed by the coils will be vacuum.

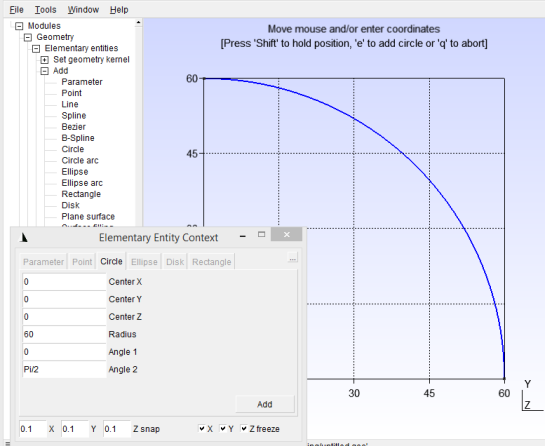
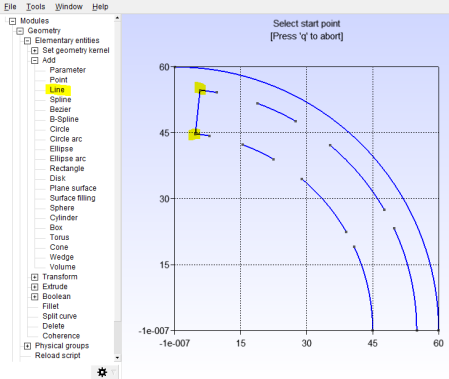
Start by making the interface between the vacuum region and the high-permeability region by drawing a circle from an angle of 0 to an angle of Pi/4 (90 degrees) and regions 60, as shown in Figure 10.
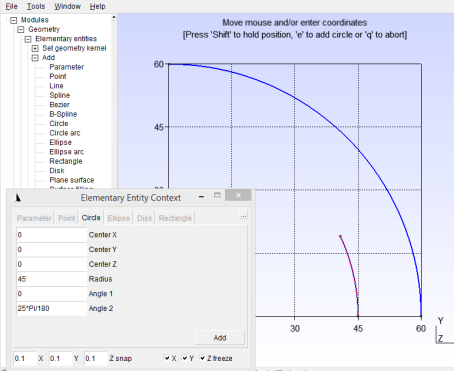
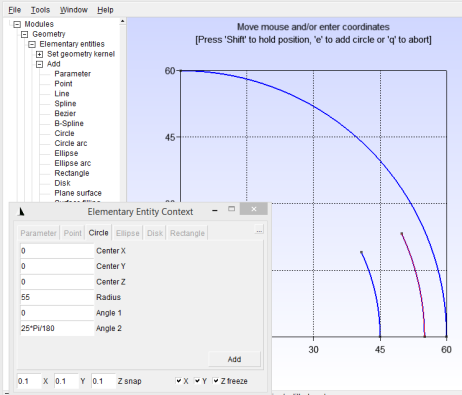
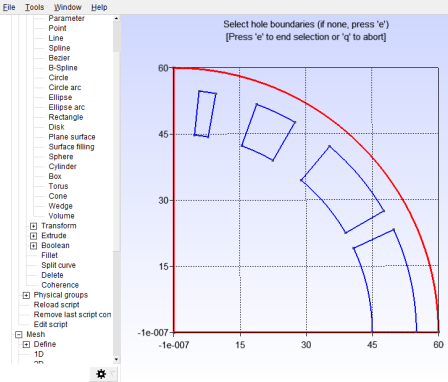
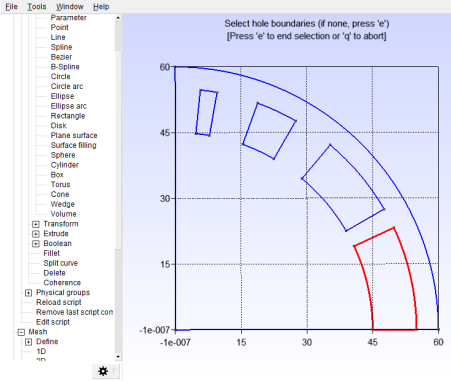
Next draw the inner line of the first conductor region with another circle, this time with a radius of 45 and angle from 0 to 25/180*Pi as shown in Figure 11. Draw the out circle by increasing the radius to 55, but leaving the angle, as shown in Figure 12.
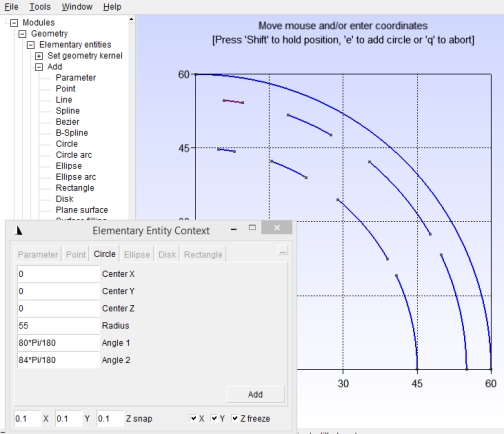
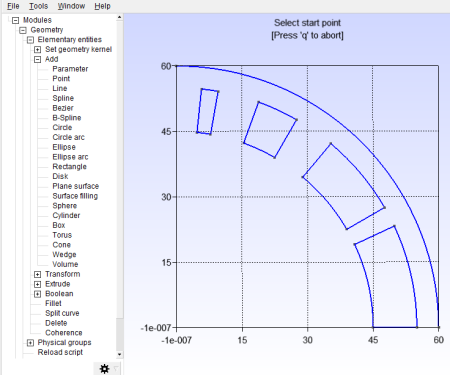
Now repeat this step with the following angles, at radii 45 and 55. Afterwards you should have the lines resembling those in Figure 13.
| From Angle | To Angle |
 |
 |
 |
 |
 |
 |
Now use the line tool and select the points at the edges of the current regions to turn them into closed curves; Figure 14 indicates how to do this, and the geometry shoul look like Figure 15 when you’re done.
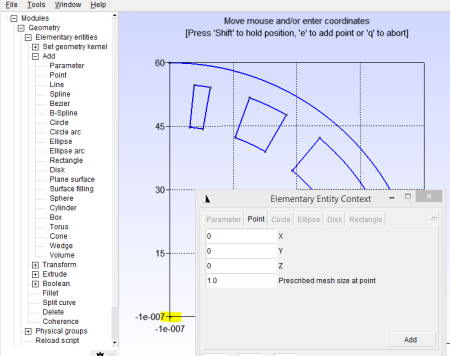
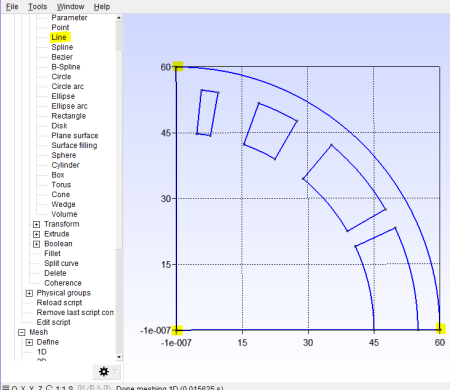
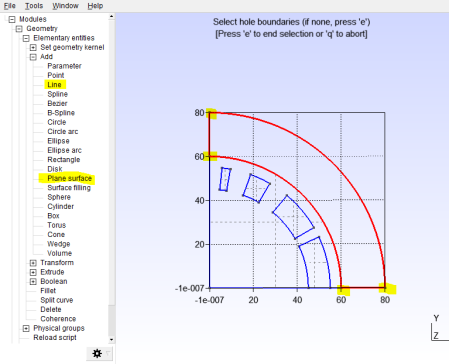
Now we need to enclose the vacuum region; start by adding a point at (0, 0) as shown in Figure 16, then draw lines from (0, 0) to (60, 0) and (0, 60) as indicated in Figure 17.
Now this is starting to look like a magnet, but we’ve just got an outline at the moment and now we’ll turn these into surfaces. Add a “Plane Surface” entity, then select the large quarter-circle which bounds the vacuum region as shown in Figure 18. Repeat this for the current regions as shown in Figure 19. You should have five surfaces in total when you’re finished.
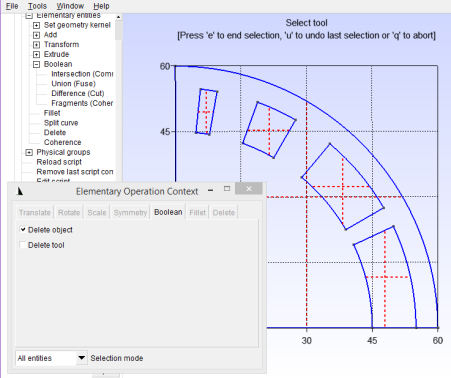
Now we’re going to cut the current region surfaces out of the vacuum surface using the Boolean Difference tool. Ensure that “delete object” is selected, but “delete tool” is not, then select the vacuum surface as the “object”, and the current region surfaces as the “tool”; see Figure 20.
The vacuum region and current regions are now ready. To add the high-permeability region draw another quarter-circle with a radius of 80, connect the edges with lines and convert it to a plane surface just like before and as indicated in Figure 21.
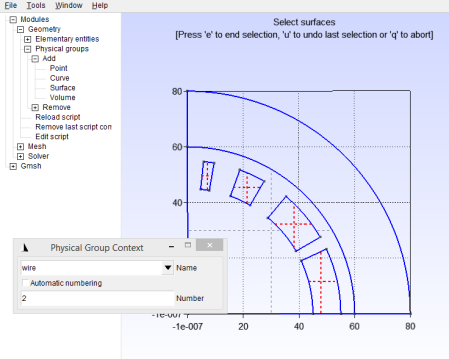
The final step is to assign labels to various parts of this geometry. Click Geometry > Physical Groups > Add > Surface, then add all the current region surfaces, assign a sensible label and set a reasonable number; this number will be used later; see Figure 22.
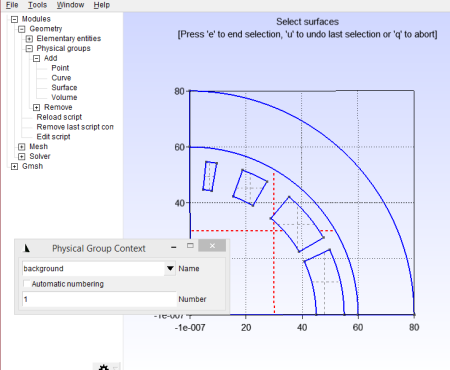
Add the vacuum region as another surface group , and assign a different name and number as shown in Figure 23.
Add the high-permeability region as another surface group with a different name and number; I called mine “iron” with number 6.
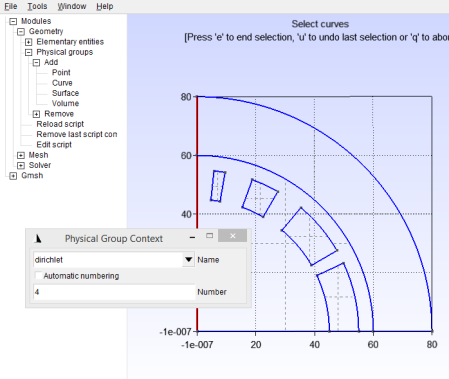
All of the physical surfaces have now been labelled and we need to assign some physical groups to the lines marking certain boundary conditions; to understand the choice for these boundaries see the earlier post on using symmetry. The line along the bottom of the geometry will be a Neumann boundary condition which sets 


Next we want to apply a Dirichlet boundary on the vertical line, which will set
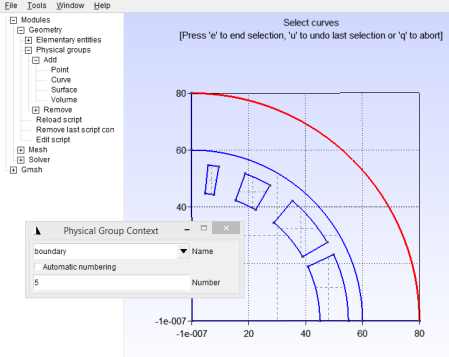
Finally, add the outermost line as another physical group called “boundary” and give this a reasonable number, as shown in Figure 26.
3.2.1 – Mesh
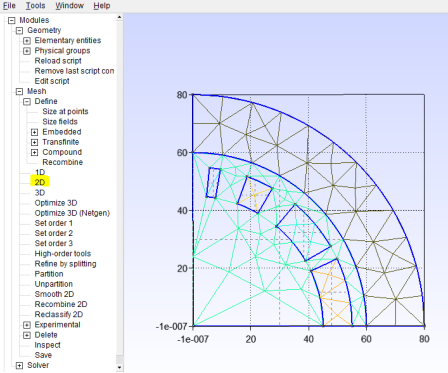
The geometry is now finished and ready to be meshed. Pressing 2D without any manipulation will produce the mesh in Figure 27. This mesh doesn’t have a very good resolution, but the colours indicate that the region have been separated, and the fact that vertices join the different regions at the interfaces suggest there is no overlap. We could solve the problem with this mesh, but it would be better to manually refine it.
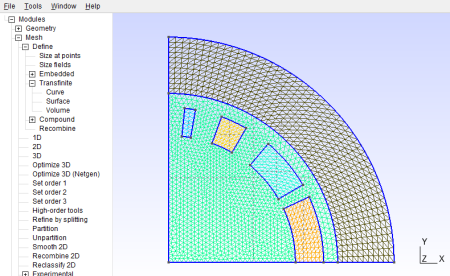
To start define all lines as transfinite curves by clicking Mesh > Define > Transfinite > Curve, selecting a line and specifying how many cells should be spaced accross it. If you specify the same segmentation on lines of concentric circles (e.g. the two curved lines of a current region) then you can also specify this region as a transfinite surface, which will make a structured mesh. My final mesh is shown in Figure 28, if you’d like to see the exact settings I used, see the magnet/geo_charge.geo in the repository.
Newer versions of gmsh use a file format that doesn’t (at the time of writing) work with FEniCS, so rather than generating the mesh from inside the gui we need to use a terminal or command prompt in windows. Open your terminal and navigate to the directory with your .geo files in (using cd). Generate your mesh with the command:
gmsh -2 -format msh2 FILENAME.geo
which asks Gmsh to use an older version of the mesh format. This will only work if gmsh is on your system path, if it isn’t then you’ll need to find the location of your gmsh binary file and use the full path instead of just “gmsh” in the command above.
If gmsh has successfully produced your mesh, you’ll now have a file called FILENAME.msh, which has to be converted to the xml format FEniCS understands. To do this use the command
dolfin-convert FILENAME.msh FILENAME.xml
which should produce three files:
- FILENAME.xml
- FILENAME_physical_region.xml
- FILENAME_facet_region.xml
and if it hasn’t, then you’ll need to revisit the earlier steps. The rest of this tutorial won’t work unless you have these three files.
3.3 – FEniCS Solution
Now the mesh is finished, so it’s time to close GMsh and start working with FEniCS. Remember that the full code for this is available in the repository, so look there if anything isn’t working for you.
Begin by importing all the necessary packages
import fenics as fn import matplotlib.pyplot as plt import numpy as np from scipy.constants import mu_0
3.3.1 – Import Mesh and Define Measures
Import the mesh you just generated with dolfin-convert with the code below. You’ll have to adjust the filenames to match those of the three files produced by dolfin-convert; so magnet/magnet.xml would just be FILENAME.xml.
mesh = fn.Mesh('magnet/magnet.xml')
subdomains = fn.MeshFunction("size_t", mesh, 'magnet/magnet_physical_region.xml')
boundaries = fn.MeshFunction('size_t', mesh, 'magnet/magnet_facet_region.xml')
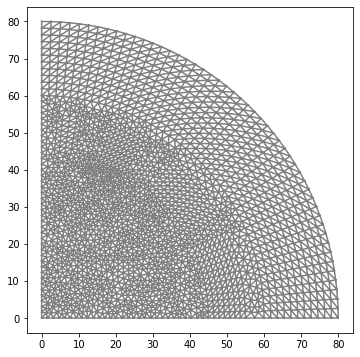
To verify that the mesh is as you’d expect, plot it with the code below, and ensure the output looks correct; see Figure 29.
Now define the same measures as were defined for the coaxial example.
dx = fn.Measure('dx', domain=mesh, subdomain_data=subdomains)
ds = fn.Measure('ds', domain=mesh, subdomain_data=boundaries)
V0 = fn.FunctionSpace(mesh, 'DG', 0)
V = fn.FunctionSpace(mesh, 'P', 2)
3.3.2 – Boundary Conditions
FEniCS automatically assigns Neumann conditions to any boundaries without explicit boundary conditions, so only the Dirichlet boundaries need to be specified.
The first of these conditions is the outer boundary whose physical group was called “boundary” in GMsh, whose vector potential we set to zero; thus setting 


outer_boundary = fn.DirichletBC(V, fn.Constant(0), boundaries, 5) dc = fn.DirichletBC(V, fn.Constant(0), boundaries, 4) bcs = [outer_boundary, dc]
3.3.3 – Define current density
The value of the current density has been taken from an existing dipole magnet design [8], which had a total of 28 wires in a quarter section and each wire carried a maximum of 12,119A. The current density is then found by multiplying the current in each wire, by the number of wires, and then dividing this by the calculated area of region 2 (conducting regions). The current density is defined inside the eval_cell method of the UserExpression [7] shown below. The cell marker (self.markers[cell.index]) is the physical group number assigned in Gmsh. If this is equal to 2 (the value of the current regions) then the value is set, otherwise it is 0.
num_wires = 28 area = fn.assemble(1*dx(2)) I = 12119 class j(fn.UserExpression): def __init__(self, markers, **kwargs): self.markers = markers super().__init__(**kwargs) def eval_cell(self, values, x, cell): if self.markers[cell.index] == 2: values[0] = I * num_wires / area else: values[0] = 0 return 0 current_density = j(subdomains, degree=1)
current_density is then specified as an instance of this class, and can be plotted with the code, which produces Figure 9.
plt.figure(figsize=(6,6)) fn.plot(mesh, linewidth=0.5) p = fn.plot(fn.project(current_density, V0)) plt.colorbar(p) plt.tight_layout() plt.show()
3.3.4 – Define material properties
Define another user expression to set the permeability of the different regions. This time identify the physical group associated with the high-permeability region and set this to a large value (I used 4000*mu_0) and all other regions should have mu_0.
class Permeability(fn.UserExpression):
def __init__(self, markers, **kwargs):
super().__init__(kwargs)
self.markers = markers
def eval_cell(self, values, x, cell):
if self.markers[cell.index] == 6:
values[0] = 4e3 * mu_0
else:
values[0] = mu_0 # vacuum
mu = Permeability(subdomains, degree=1)
3.3.5 – Solve
Everything is now in-place to be solved. The code to do this is very similar to the code used for the coax example, except I’ve put the permeability into a, rather than L; if it’s left inside L then the discontinuities aren’t seen because j=0 everywhere other than inside the wire regions. This produces the magnetic field shown in Figure 30.
# Define variational problem A_z = fn.TrialFunction(V) v = fn.TestFunction(V) a = 1 / mu*fn.dot(fn.grad(A_z), fn.grad(v))*dx L = current_density*v*dx # Solve variational problem A_z = fn.Function(V) fn.solve(a == L, A_z, bcs) # Compute magnetic field (B = curl A) W = fn.VectorFunctionSpace(mesh, 'P', 1) B = fn.project(fn.as_vector((A_z.dx(1), -A_z.dx(0))), W)
3.4 – Exploration of Numerical Results
Fields between the adjacent conductors in Figure 30 are reduced, which can be seen to be expected by the right-hand screw rule. There is also a sudden change in field at r=60, where the high-permeability material starts; although the field inside the material seems to rapidly increase, rather than being truly discontinuous. The field in the beam-region certainly appears to be of the uniform, dipolar variety; which is what we expected.
Until now I haven’t defined any units, but it would be nice to know the field strength in Tesla. If the spatial unit is taken as mm, then the derivative of A_z will produce the unit V/s/m/mm, which is equal to 1000 T. Multiplying the results by 1000 produces the field plot in Figure 31, which has a field of around 6.9 T in the beam region. Although a direct comparison with the dipole magnet in [8] isn’t possible that magnet was supposed to produce a field of 6T with this current. Given that the coils were drawn by eye to appear similar to that magnet and thus they are not identical, this seems like a reasonable answer. Furthermore Figure 18 in [8] shows a strong field in the smallest winding which is also seen in Figure 30. The fields predicted inside the iron are well beyond what would cause saturation, so the linear permeability approximation is not a good one and will make this result inaccurate.
4.0 – Conclusion
Magnetostatics has been demonstrated using a simple coaxial current distribution, by solving the Laplace equation in the Coulomb gauge. This agreed well with analytical predictions. This technique was then expanded to solve for the field in a 
Overall this seems to have worked pretty well, but until further benchmarking had been performed, I certainly wouldn’t build any expensive magnets based on this result!
The files for both the coaxial structure and the magnet are available on gitlab, along with notebooks that complete all the steps described here. The geo, msh and xml files are also available in the repository, so that this can all be reproduced.
Please do get in-touch if this has been interesting to you, or if you have any comments, corrections or suggestions (or if you’d like to provide me with a benchmark for the magnet result).
References
[1] – J. F. Keithley, “The Story of Electrical and magnetic Measurements from 500 BC to the 1940’s”, https://blackwells.co.uk/bookshop/product/9780780311930
[2] – Griffiths, David J. Introduction to Electrodynamics. 4 edition. Cambridge, United Kingdom ; New York, NY: Cambridge University Press, 2017.
[3] – GMsh 4.6.0, https://gmsh.info/doc/texinfo/gmsh.html 03/07/2020
[4] – MaGIc2laNTern / CC BY (https://creativecommons.org/licenses/by/3.0), https://commons.wikimedia.org/wiki/File:Closer_look_at_an_lhc_dipole_magnet_in_belgrade.jpg
[5] – Mike Lamont, “LHC: Overview, Status and Commissioning Plans”, 2007, https://lhc-commissioning.web.cern.ch/presentations/LHC-intro-and-status-may07.pdf
[6] – Anders Sandberg, https://www.flickr.com/photos/arenamontanus/867248938/in/photolist-2jCSTU-W61rLT-2crtrZV-fuEqcy
[7] – FEniCS Online Documentation, https://fenicsproject.org/docs/dolfin/dev/python/demos/mixed-poisson/demo_mixed-poisson.py.html?highlight=userexpression, accessed 08/2020.
[8] – L. Dyks, D. W. Posthuma de Boer, A. Ross, M. Backhouse, S. Alden, G. L. D’ Alessandro, D. Harryman, “The Superconducting Super Proton Synchrotron”, http://cds.cern.ch/record/2681200 https://github.com/student-scsps-project/magnetDesign/blob/master/scSPSDipole_qrt.comi

{kind=link}
Hi! Great intros to both gmsh and Fenics here in general.
I’ve noticed that you are still in the xml workflow for the mesh using dolfin-convert. This method is obsolete and will be dropped soon.
Maybe my “finding” (or fiddling as I tend to call it) may interest you:
https://bowfinger.de/blog/2020/12/breaking-changes-fenics-and-meshio4-0-0/
https://bowfinger.de/blog/2020/12/breaking-changes-2-pygmsh-fenics-and-meshio4-0-0/
Bests,
Christian
LikeLike
Thanks for your blog! After several weeks of trying to input a 3D mesh into Fenics (which has now come out with Fenicsx 2021 version), I found your method was the only one that worked. We used a recent version of Gmsh (4.8.4) which has “cubes” in it, made opposite faces with Dirichlet voltages, and simulated a Halbach array. Dumped the mesh as a 3D mesh2 object, performed the “dolfin-convert” on it, and read it into Fenics, where we used an electrostatic potential to simulate the magnetostatic potential—they both satisfy the Poisson equation. Then projecting the gradient onto a FunctionSpace (DG, 0) [ though I see you used P,1 for the magnetic field] we could visualize it with Paraview, since the Matplotlib interface that is native to Fenics doesn’t really do 3D very well at all. Paraview made some gorgeous plots and even movies.
Now we are trying to implement dolfin-adjoint to get the model to agree with some laboratory measurements. I think if you had a post on dolfin-adjoint and 3D it would really be helpful. If you are interested, I’ll send you the code when and if we get it working.
LikeLike